Начална страница > Продукти > Колаборативен робот > Лабораторен Робот HelenX > Мобилен съвместим робот HelenX-MR6

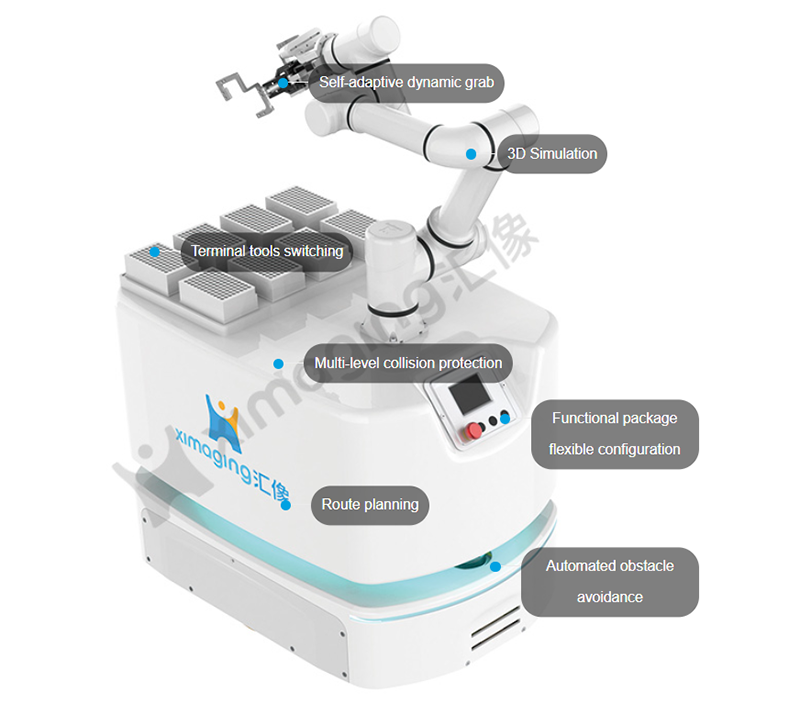
Съставният мобилен робот, разработен от XImaging, се състои от AMR и колаборативен робот. Продуктът използва напреднала дуална лазерна навигационна технология, инсталирана с различни сензори и визуални системи, които позволяват идентификацията на околната среда за да се избягват всички препятствия по маршрута и винаги да следва ефективен път към.destination за експерименти.
Задоволителна работна ефективност и последователност, роботът напълно замества повтарящите се, сложни и скучни ръчни операции. Пробите се зареждат чрез високопропускна способност на стойката, което позволява необслужвано функциониране за продължителен период. Ви предлагаме две серии: Фиксирани колаборативни роботи и Мобилни колаборативни роботи (Рейл, AGV), за различни експериментални приложения според вашите нужди от пространство, носимост и сценарии.
| Размер | 800*600*700mm |
| Тегло | 120кг |
| Навигация | Двойна лазерна радар SLAM |
| Метод за привод | двойна колова диференциална система |
| Терминална носимост | 3kg |
| Нагрузка на платформата | 150кг |
| Интегрирана точност на позиционирането | +/-0.5mm |
| Нагрузка на платформата | 150кг |
| Максимална навигационна скорост | 1.4м/с |
| Капацитет на батерията | 48в/35Аh |
| Общо издръжливост | 10ч |
| Работна среда | 90% относителна влажност (неконденсираща); 0-50℃ |
| МЕТОД ЗА ЗАРЕЖДАНЕ | Автоматично, смяна на батерията, ръчно |
Ограничен пространство
Лазерната навигация позволява мобилните роботи да се движат през сравнително малко пространство.
Оборудване в безредица
Когато точките са разположени правилно, мобилните роботи лесно могат да намерят необходимото оборудване.
Трудно за модифициране
Мобилните роботи по принцип не изискват промяна на настоящото работно място.
Превод между етажи
Способни да взаимодействат с асансьори, автоматични врати и прозорци за прехвърляне на примери.
Ненаблюдавана чиста зона
След стерилизация, мобилните роботи могат да работят автономно в чистата зона, с отдалечено управление.
Опасна среда
Опасната среда за приложни сценарии на биохимия няма да подлагат мобилните роботи на риск.
УМНА СИСТЕМА ЗА НАУЧНИ ОПЕРАЦИИ
Графичният интерфейс позволява на потребителите лесно да създават експериментални методи чрез перетегляне и пускане. Те могат да бъдат стартирати с едно щракване, просто и потребителят приятелски. Могуществени функции, които позволяват прецизен контрол на всяка позиция на робота. Поддържа кръстоплатформеност и много терминали, като ПК, таблети и мобилни телефони.


![auth_code[2].png](https://shopcdnpro.grainajz.com/category/397899/2549/62d2048fdf61adc5569f440a524f1791/auth_code%5B2%5D.png)