Hlavní strana > Produkty > Kolaborativní robot > Laboratorní robot HelenX > Mobilní spolupracující robot HelenX-MR6

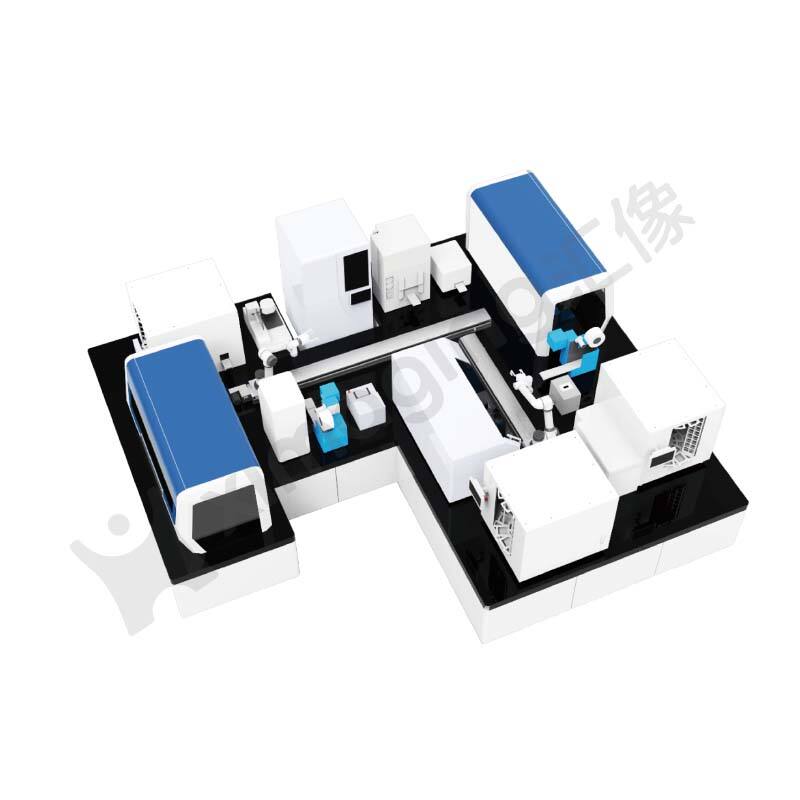
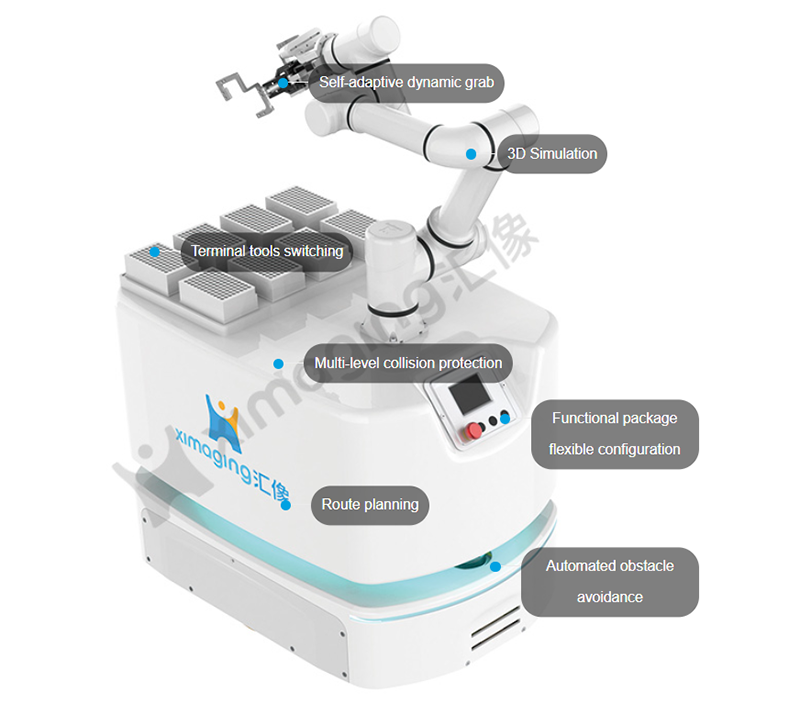
Složený mobilní robot, vyvinutý společností XImaging, je tvořen AMR a spolupracujícím robotem. Pokročilá duální laserová navigační technologie, vybavená různými senzory a vizuálními systémy, umožňuje identifikaci okolí a vyhýbání se jakémukoli překážkám na trase, vždy na efektivních trasách k dosažení cíle pro experimenty.
Zajišťuje pracovní účinnost a konzistenci, tento robot úplně nahrazuje opakující se, složité a nudné manuální operace. Vzorky načítané prostřednictvím vysokoprůchodového nosiče umožňují dlouhodobý nekontrolovaný provoz. Nabízíme vám dva typy: Pevný spolupracující robot a Mobilní spolupracující robot (Rail, AGV), pro různé experimentální aplikace podle vašich požadavků na prostor, zátěž a scénáře.
| Rozměr | 800*600*700mm |
| Hmotnost | 120kg |
| Námořní navigace | Dvouzáporný laserový radar SLAM |
| Způsob pohybu | dvojitá kolová diference |
| Terminální zátěž | 3kg |
| Nákladová platforma | 150kg |
| Integrovaná umístění precision | +/-0.5mm |
| Nákladová platforma | 150kg |
| Maximální rychlost navigace | 1.4m/s |
| Kapacita baterie | 48v/35Ah |
| Komplexní výdrž | 10h |
| Pracovní prostředí | 90 % relativní vlhkosti (nekondenzující); 0-50℃ |
| Způsob nabíjení | Automatické, s výměnou baterie, ruční |
Omezený prostor
Laserová navigace umožňuje mobilním robotům pohybovat se přes relativně malý prostor.
Nepořádek zařízení
Jakmile budou body správně nasazeny, mobilní roboti mohou snadno najít požadované vybavení.
Těžké k úpravám
Mobilní roboti v podstatě nevyžadují žádnou úpravu stávajícího pracoviště.
Přeprava mezi patry
Schopný interakce s výtahy, automatickými dveřmi a přenosovými okny pro přenos vzorků.
Neposazená čistá oblast
Po sterilizaci mohou mobilní roboti pracovat nezávisle v čisté oblasti, se vzdáleným ovládáním.
Nebezpečné prostředí
Nebezpečné prostředí pro aplikace biochemických scénářů nepoloží mobilní roboty do rizika.
CHYTŘE VĚDECKÝ OPERAČNÍ SYSTÉM
Návrh grafického rozhraní umožňuje uživatelům snadno vytvářet experimentální metody pomocí přetažení a spouštět je jediným kliknutím, jednoduché a uživatelsky přátelské. Silné funkce umožňují přesnou kontrolu každé pozice robota. Podporuje křížové platformy a více terminálů, jako jsou počítače, tablety a mobilní telefony.


![auth_code[2].png](https://shopcdnpro.grainajz.com/category/397899/2549/62d2048fdf61adc5569f440a524f1791/auth_code%5B2%5D.png)