Forside > Produkter > Samarbejdsrobot > Laboratorierobot HelenX > Flydende samarbejdsrobot HelenX-MR6

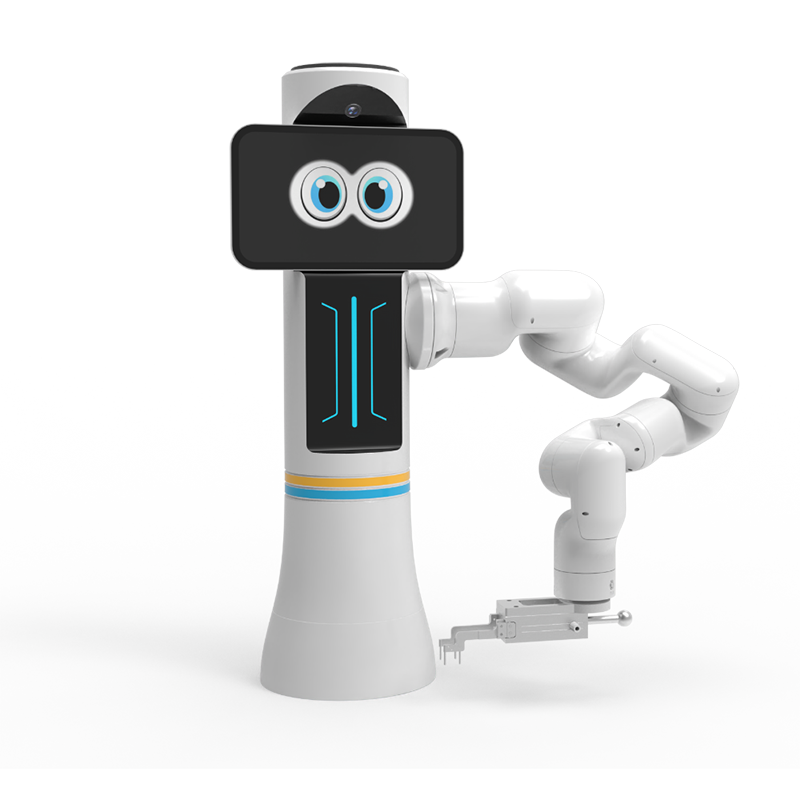
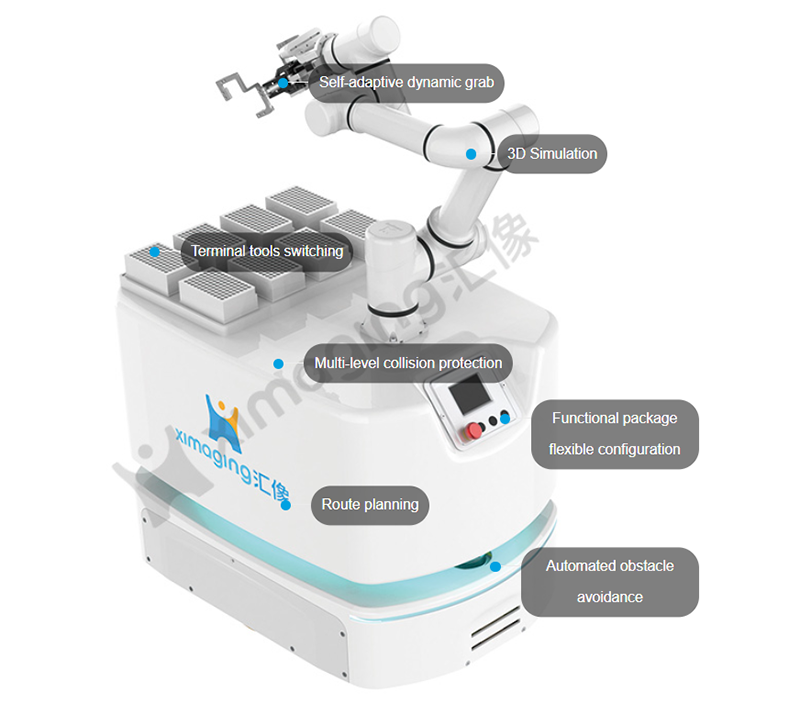
Den sammensatte mobile robot, som er udviklet af XImaging, består af AMR og en kollaborativ robot. Avanceret dobbelt laser navigations teknologi, installeret med forskellige sensorer og visionsystemer, gør det muligt at identificere omgivelserne og undgå alle hindringer på ruteren, altid på effektive ruter for at nå frem til destinationen for eksperimenter.
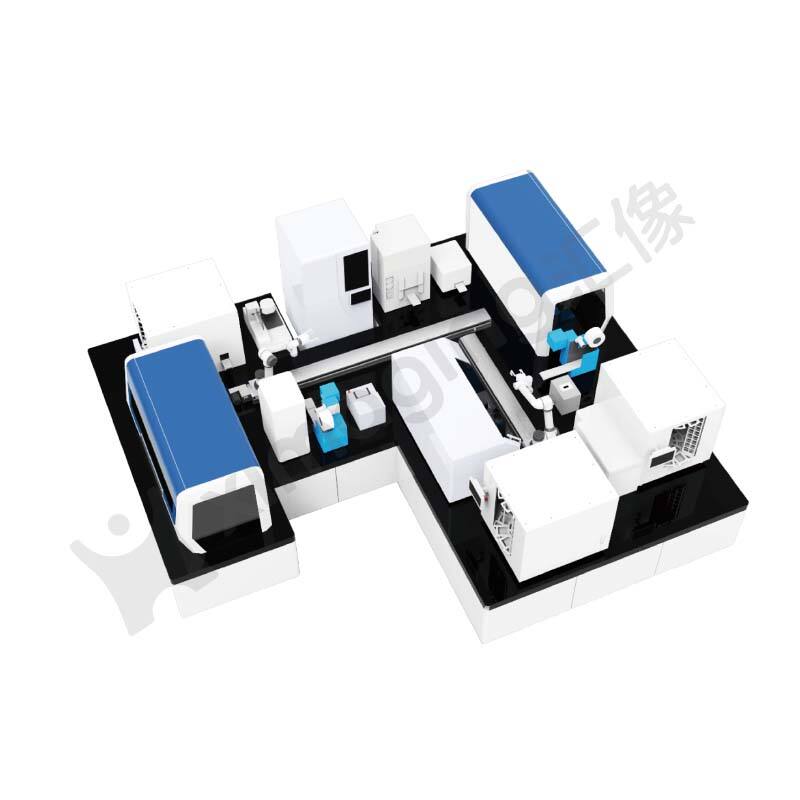
Tilfredsstillende arbejds-effektivitet og konsistens, roboten erstatter fuldt ud gentagne, komplekse og kedelige manuelle operationer. Prøver indlæses via højgennemstrømningsholder, hvilket tillader uovervåget drift i lang tid. Vi tilbyder dig to serier: Faste Samarbejdsvenlige Roboter og Mobile Samarbejdsvenlige Roboter (Rail, AGV), til forskellige eksperimentelle anvendelser baseret på dine krav til rum, last og situationer.
| Dimension | 800*600*700mm |
| Vægt | 120kg |
| Navigation | Dobbelt laserscanningsradar SLAM |
| Drivemetode | dobbelt hjul differential |
| Terminallast | 3kg |
| Platformlast | 150kg |
| Integreret positionsnøjagtighed | +/-0.5mm |
| Platformlast | 150kg |
| Maksimal navigationshastighed | 1.4m/s |
| Batterikapacitet | 48v/35Ah |
| Almen udholdenhed | klokken 10 |
| Arbejdsmiljø | 90% relativ fugtighed (ikke-kondenserende); 0-50℃ |
| Opladningsmetode | Automatisk, skift af batteri, manuelt |
Begrænset plads
Lasernavigationen gør det muligt for mobile robotter at køre gennem relativt små rum.
Udstyr i uorden
Når punkterne er deployet korrekt, kan mobile robotter nemt finde det påkrævede udstyr.
Svært at ændre
De mobile robotter kræver i princippet ingen ændring af din nuværende arbejdsplads.
Overfladeoverførsel
Kompeterende til at interagere med elektrovarer, automatiske døre og overførselsvinduer til prøveoverførsel.
Ubevogtet rene område
Efter sterilisering kan mobile robotter arbejde uafhængigt i det rene område med fjernbetjening.
Farlig miljø
Det farlige miljø for anvendelses-scenarier inden for biokemi vil ikke stille mobile robotter under risiko.
SMART VIDENSKABELIG OPERATIONSYSTEM
Det grafiske grænseflade-design gør det muligt for brugere at nemt oprette eksperimentmetoder ved trække-og-slip. Start dem med kun ét klik, simpelt og brugervenligt. Kraftfulde funktioner, der muliggør nøjagtig kontrol af hver position af robotten. Det understøtter krydskommunikation og flere terminaler, såsom PC'er, tabletter og mobiltelefoner.


![auth_code[2].png](https://shopcdnpro.grainajz.com/category/397899/2549/62d2048fdf61adc5569f440a524f1791/auth_code%5B2%5D.png)