Página de inicio > PRODUCTOS > Robot colaborativo > Robot de Laboratorio HelenX > Robot colaborativo móvil HelenX-MR6

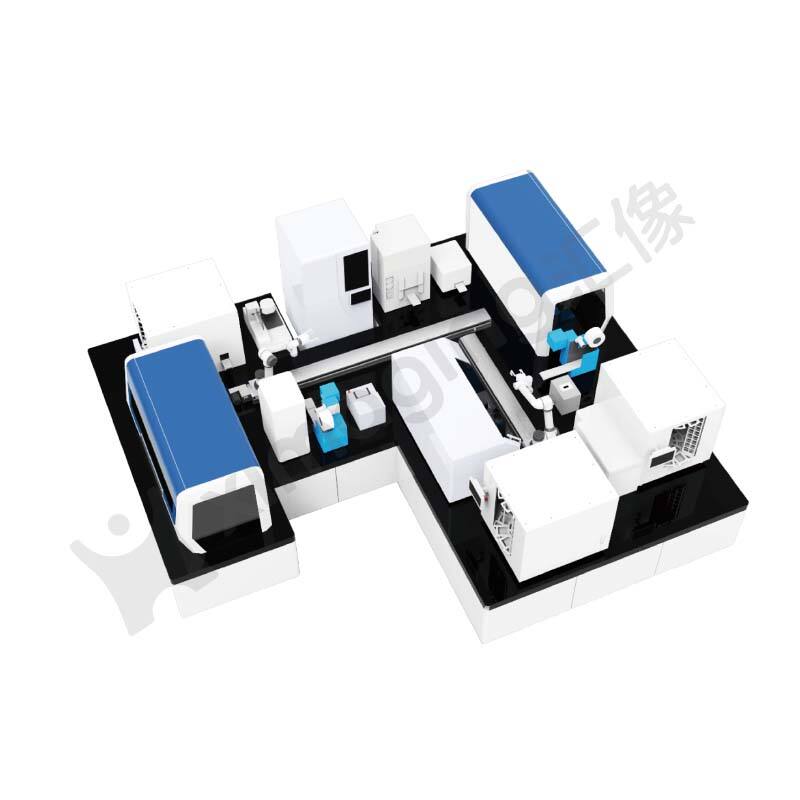
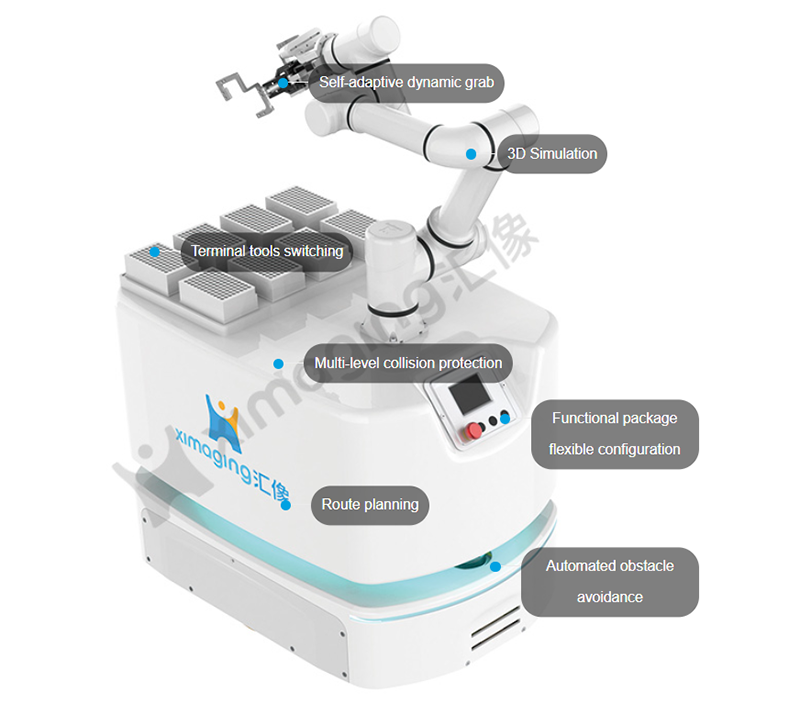
El robot móvil compuesto, desarrollado por XImaging, está formado por un AMR y un robot colaborativo. Con tecnología avanzada de navegación láser dual, instalado con diferentes sensores y sistemas de visión, permite la identificación del entorno para evitar cualquier obstáculo en la ruta, siempre manteniendo rutas efectivas para llegar al destino de los experimentos.
Satisfacción en la eficiencia y consistencia del trabajo, el robot reemplaza completamente operaciones manuales repetitivas, complejas y aburridas. Las muestras se cargan a través de un bastidor de alto rendimiento, lo que permite una operación no atendida durante mucho tiempo. Ofrecemos dos series: Robot Colaborativo Fijo y Robot Colaborativo Móvil (Rail, AGV), para diferentes aplicaciones experimentales basadas en sus necesidades de espacio, carga y escenarios.
| Dimensión | 800*600*700mm |
| Peso | 120 kilos |
| Navegación | SLAM de doble radar láser |
| Método de Accionamiento | diferencial de doble rueda |
| Carga terminal | 3kg |
| Carga de plataforma | 150kg |
| Precisión de posicionamiento integrada | +/-0.5mm |
| Carga de plataforma | 150kg |
| Velocidad máxima de navegación | 1.4m/s |
| Capacidad de la batería | 48v/35Ah |
| Resistencia integral | las 10 |
| Medio ambiente de trabajo | 90% de humedad relativa (no condensada); 0-50℃ |
| Método de carga | Automático, cambio de batería, manual |
Espacio limitado
La navegación láser permite a los robots móviles moverse a través de un espacio relativamente pequeño.
Equipo desordenado
Una vez que los puntos están correctamente desplegados, los robots móviles pueden encontrar el equipo requerido fácilmente.
Difícil de modificar
Los robots móviles basically no requieren ninguna modificación de tu lugar de trabajo actual.
Transferencia entre pisos
Capaz de interactuar con ascensores, puertas automáticas y ventanas de transferencia para la transferencia de muestras.
Área Limpia No Atendida
Después de ser esterilizado, los robots móviles pueden trabajar de forma independiente en el área limpia, con control remoto.
Entorno Peligroso
El entorno peligroso para escenarios de aplicación bioquímica no pondrá a los robots móviles en riesgo.
SISTEMA DE OPERACIÓN CIENTÍFICA INTELIGENTE
El diseño de interfaz gráfica permite a los usuarios crear métodos experimentales fácilmente mediante arrastrar y soltar. Inícialos con un solo clic, simple e intuitivo. Funciones poderosas, permitiendo un control preciso de cada posición del robot. Soporta plataformas cruzadas y múltiples terminales, como PCs, tabletas y teléfonos móviles.


![auth_code[2].png](https://shopcdnpro.grainajz.com/category/397899/2549/62d2048fdf61adc5569f440a524f1791/auth_code%5B2%5D.png)