Page d'accueil > Produits > Robot collaboratif > Robot de laboratoire HelenX > Robot collaboratif mobile HelenX-MR6

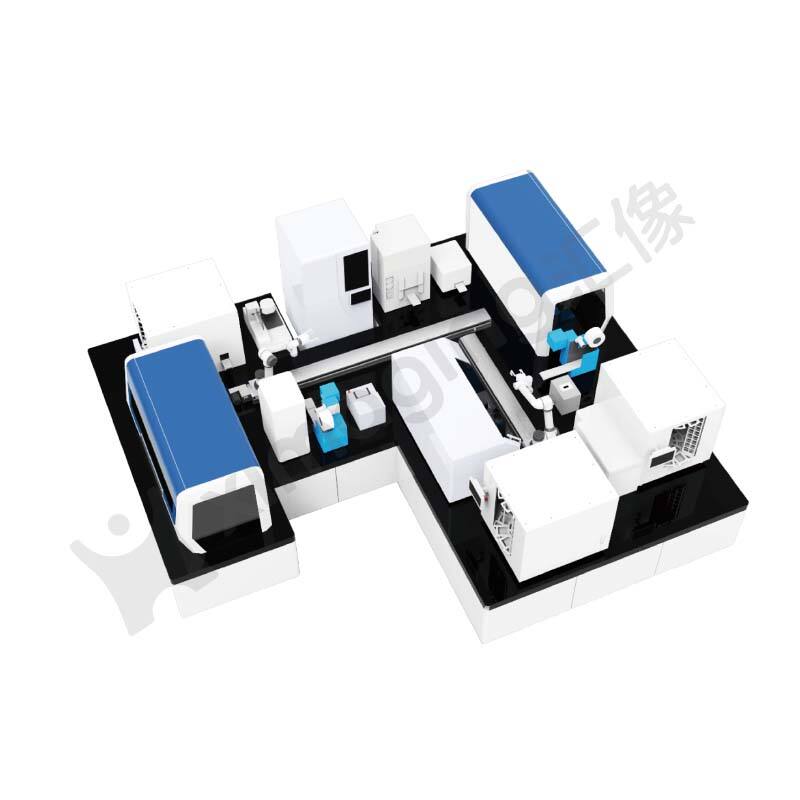
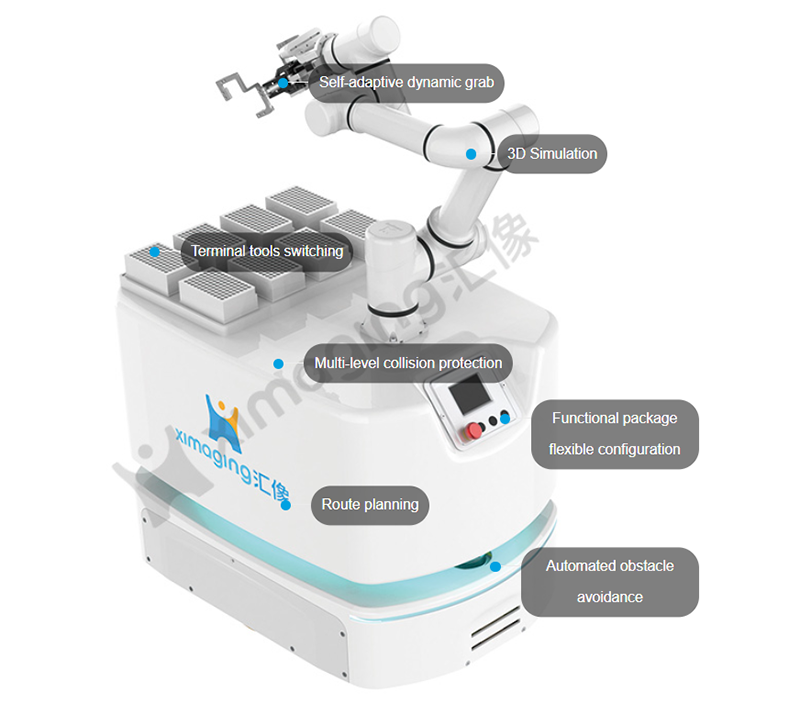
Le robot mobile composite, développé par XImaging, est composé d'un AMR et d'un robot collaboratif. Muni d'une technologie avancée de navigation laser double, associée à différents capteurs et systèmes de vision, il permet une identification des alentours pour éviter tout obstacle sur sa trajectoire, restant toujours sur des itinéraires efficaces pour atteindre la destination expérimentale.
Satisfaction en matière d'efficacité et de cohérence du travail, le robot remplace entièrement les opérations manuelles répétitives, complexes et ennuyeuses. Les échantillons sont chargés via un rack à haut débit, permettant une opération sans surveillance pendant de longues périodes. Nous vous proposons deux séries : Robot Collaboratif Fixe et Robot Collaboratif Mobile (Rail, AGV), pour différentes applications expérimentales en fonction de vos besoins en termes d'espace, de charge et de scénarios.
| Dimension | 800*600*700mm |
| Poids | 120 kg |
| Navigation | SLAM à double radar laser |
| Méthode de commande | différentiel à double roue |
| Charge terminale | 3 kg |
| Charge de la plateforme | 150kg |
| Précision de positionnement intégrée | +/-0.5mm |
| Charge de la plateforme | 150kg |
| Vitesse de navigation maximale | 1.4m/s |
| Capacité de la batterie | 48v/35Ah |
| Endurance complète | 10h |
| Environnement de travail | 90 % d'humidité relative (non condensée) ; 0-50℃ |
| Méthode de chargement | Automatique, changement de batterie, manuel |
Espace limité
La navigation laser permet aux robots mobiles de se déplacer dans un espace relativement restreint.
Matériel en désordre
Une fois que les points sont déployés correctement, les robots mobiles peuvent trouver facilement l'équipement requis.
Difficile à modifier
Les robots mobiles n'exigent généralement aucune modification de votre chantier actuel.
Transfert inter-étages
Capables d'interagir avec les ascenseurs, les portes automatiques et les fenêtres de transfert pour le transfert d'échantillons.
Zone propre non surveillée
Après stérilisation, les robots mobiles peuvent travailler de manière autonome dans la zone propre, avec un contrôle à distance.
Environnement dangereux
L'environnement dangereux des scénarios biochimiques ne mettra pas les robots mobiles en danger.
SYSTÈME D'OPÉRATION SCIENTIFIQUE INTELLIGENT
La conception de l'interface graphique permet aux utilisateurs de créer facilement des méthodes expérimentales par glisser-déposer. Démarrez-les avec un simple clic, simple et convivial. Fonctions puissantes, permettant un contrôle précis de chaque position du robot. Il prend en charge plusieurs plateformes et terminaux, tels que les PC, les tablettes et les téléphones portables.


![auth_code[2].png](https://shopcdnpro.grainajz.com/category/397899/2549/62d2048fdf61adc5569f440a524f1791/auth_code%5B2%5D.png)