Pagina principale > Prodotti > Robot collaborativo > Robot Laboratorio HelenX > Robota collaborativo mobile HelenX-MR6

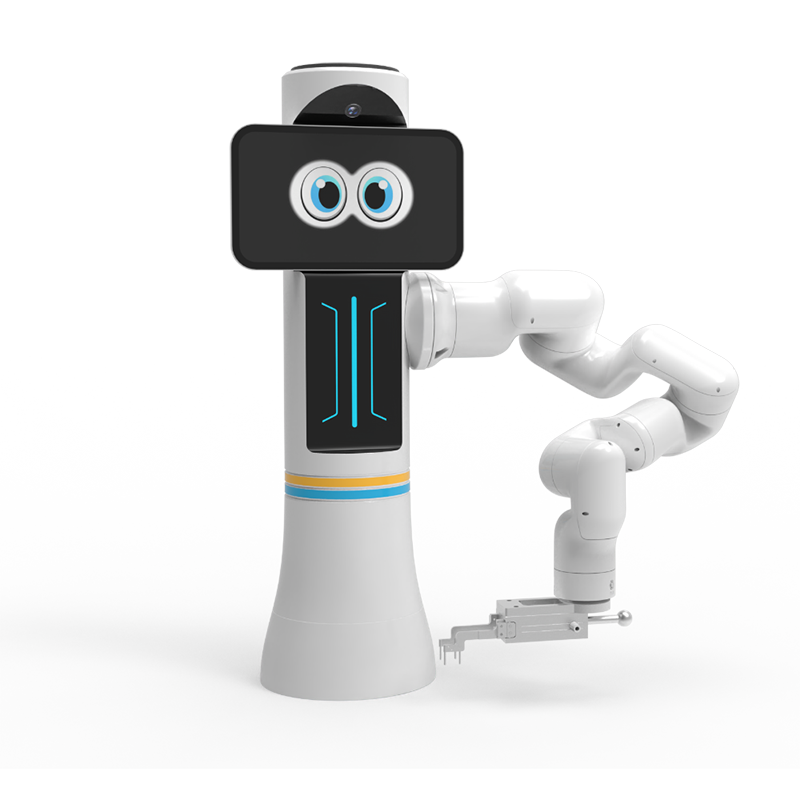
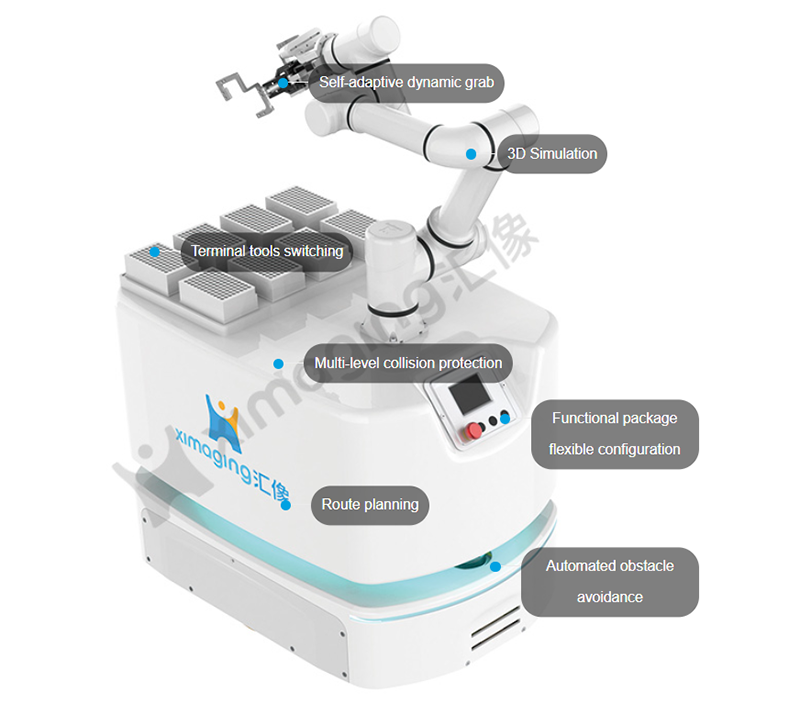
Il robot mobile composto, sviluppato da XImaging, è costituito da AMR e robot collaborativo. Dotato di tecnologia avanzata di navigazione laser doppia, installato con diversi sensori e sistemi visivi, consente l'identificazione dell'ambiente circostante per evitare qualsiasi ostacolo sulla strada, mantenendo sempre percorsi efficaci per raggiungere la destinazione per gli esperimenti.
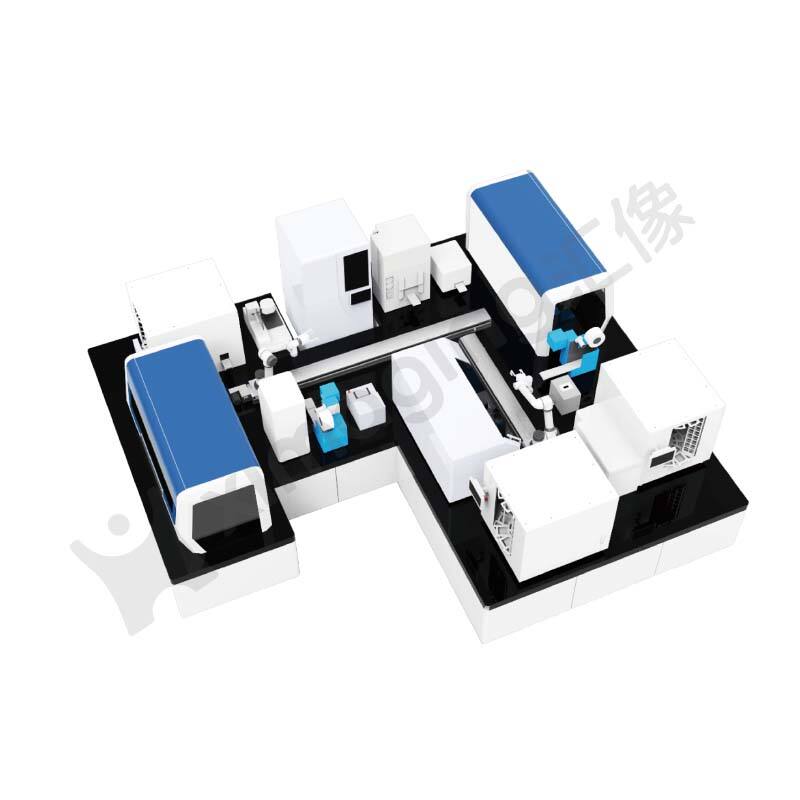
Soddisfacente efficienza e coerenza del lavoro, il robot sostituisce completamente operazioni manuali ripetitive, complesse e noiose. I campioni vengono caricati tramite supporti ad alto throughput, consentendo un funzionamento non supervisionato per lunghi periodi. Offriamo due serie: Robot Collaborativo Fisso e Robot Collaborativo Mobile (Rail, AGV), per diverse applicazioni sperimentali in base alle tue esigenze di spazio, carico e scenari.
| Dimensione | 800*600*700mm |
| Peso | 120kg |
| Navigazione | SLAM a doppio radar laser |
| Metodo di Movimento | differenziale a doppia ruota |
| Carico terminale | 3kg |
| Carico piattaforma | 150kg |
| Precisione di posizionamento integrata | +/-0.5mm |
| Carico piattaforma | 150kg |
| Velocità di navigazione massima | 1.4m/s |
| Capacità della batteria | 48v/35Ah |
| Resistenza complessiva | alle 10 |
| Ambiente di lavoro | 90% di umidità relativa (non condensante); 0-50℃ |
| Metodo di ricarica | Automatico, cambio batteria, manuale |
Spazio limitato
La navigazione laser consente ai robot mobili di muoversi in uno spazio relativamente ristretto.
Attrezzatura in disordine
Una volta che i punti sono stati distribuiti correttamente, i robot mobili possono trovare facilmente l'attrezzatura richiesta.
Difficile da modificare
I robot mobili non richiedono in pratica alcuna modifica del vostro attuale luogo di lavoro.
Trasferimento inter-piani
In grado di interagire con ascensori, porte automatiche e finestre di trasferimento per il trasporto di campioni.
Area Pulita Non Sorvegliata
Dopo essere stati sterilizzati, i robot mobili possono funzionare in modo indipendente nell'area pulita, con controllo remoto.
Ambiente Pericoloso
L'ambiente pericoloso per scenari di applicazione biochimici non mette a rischio i robot mobili.
SMART SCIENTIFIC OPERATION SYSTEM
La progettazione dell'interfaccia grafica consente agli utenti di creare facilmente metodi sperimentali tramite trascinamento e rilascio. Avvialli con un solo clic, semplice ed ergonomico. Funzionalità potenti, che consentono il controllo preciso di ogni posizione del robot. Supporta piattaforme incrociate e più terminali, come PC, tablet e telefoni cellulari.


![auth_code[2].png](https://shopcdnpro.grainajz.com/category/397899/2549/62d2048fdf61adc5569f440a524f1791/auth_code%5B2%5D.png)