홈페이지 > 제품 > 협동 로봇 > 랩 로봇 헬렌X > 이동식 협동 로봇 헬렌X-MR6

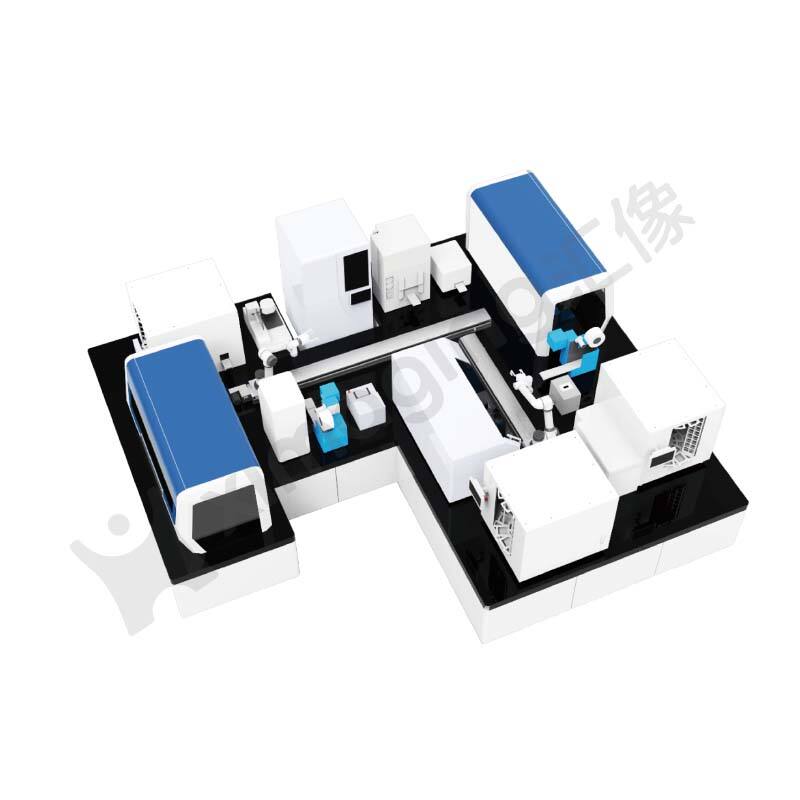
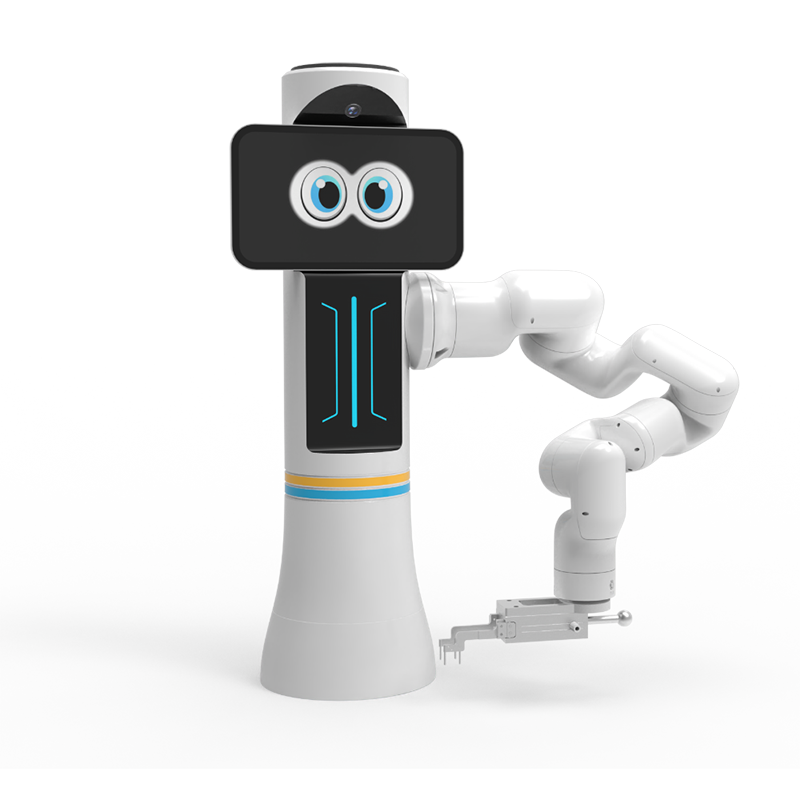
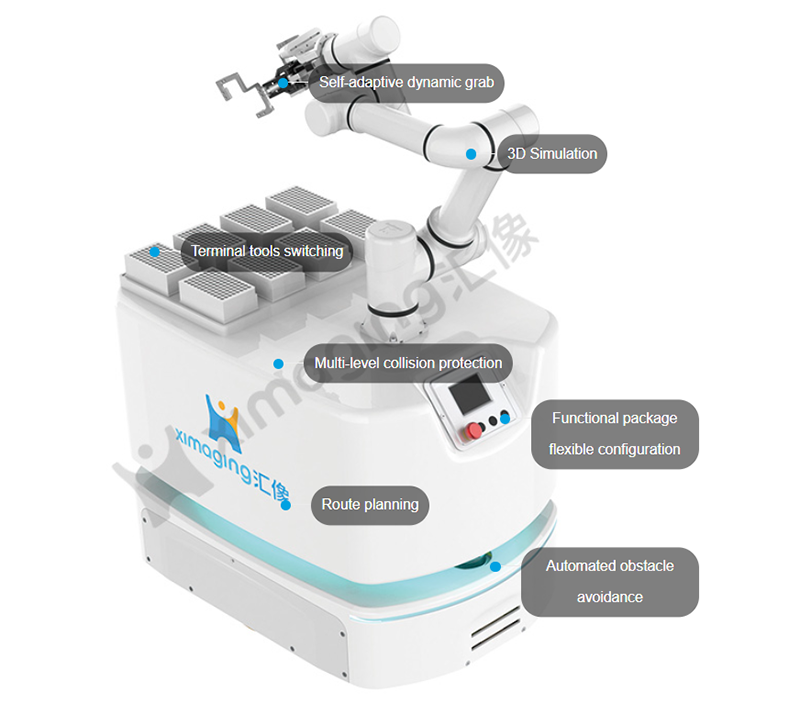
XImaging에서 개발한 복합 이동 로봇은 AMR과 협동 로봇으로 구성되어 있습니다. 고급 듀얼 레이저 내비게이션 기술로 다양한 센서와 비전 시스템이 장착되어 주변 식별이 가능하여 실험 목적지까지 항상 효과적인 경로를 통해 장애물을 회피합니다.
만족스러운 작업 효율성과 일관성, 로봇은 반복적, 복잡하고 지루한 수작업을 완전히 대체합니다. 고처리량 랙을 통해 샘플이 로드되어 장시간 무인 운영이 가능합니다. 우리는 당신에게 두 시리즈를 제공합니다: 고정형 협동 로봇 및 이동형 협동 로봇 (레일, AGV), 공간, 하중 및 시나리오 요구에 기반한 다양한 실험 응용 프로그램용입니다.
| 치수 | 800*600*700mm |
| 무게 | 120kg |
| 항해 | 듀얼 레이저 레이더 SLAM |
| 구동 방식 | 이중 바퀴 차분 구동 |
| 단말기 하중 | 3kg |
| 플랫폼 하중 | 150kg |
| 통합 위치 정확도 | +/-0.5mm |
| 플랫폼 하중 | 150kg |
| 최대 항행 속도 | 1.4m/s |
| 배터리 용량 | 48v/35Ah |
| 포괄적 내구성 | 10시 |
| 작업 환경 | 90% 상대 습도(결로 없음);0-50℃ |
| 충전 방법 | 자동, 배터리 교체, 수동 |
제한된 공간
레이저 내비게이션은 모바일 로봇이 비교적 좁은 공간을 이동할 수 있도록 합니다.
장비 무질서 상태
포인트가 적절히 배치되면 모바일 로봇이 필요한 장비를 쉽게 찾을 수 있습니다.
수정하기 어려움
이동형 로봇은 기본적으로 현재 작업장에 대한 수정이 필요하지 않습니다.
층간 이전
엘리베이터, 자동문 및 샘플 전송을 위한 전송 창과 상호 작용할 수 있습니다.
무인 청정 구역
소독 후 이동형 로봇은 원격 제어하에 청정 구역에서 독립적으로 작동할 수 있습니다.
위험한 환경
생화학적 적용 시나리오의 위험한 환경은 이동형 로봇에 위험을 초래하지 않습니다.
SMART SCIENTIFIC OPERATION SYSTEM
그래픽 인터페이스 설계를 통해 사용자는 드래그 앤 드롭으로 쉽게 실험 방법을 만들 수 있습니다. 단일 클릭으로 시작할 수 있으며, 간단하고 사용자 친화적입니다. 강력한 기능으로 로봇의 모든 위치를 정확하게 제어할 수 있습니다. 크로스 플랫폼 및 다중 단말기 지원, 예를 들어 PC, 태블릿, 스마트폰 등이 가능합니다.


![auth_code[2].png](https://shopcdnpro.grainajz.com/category/397899/2549/62d2048fdf61adc5569f440a524f1791/auth_code%5B2%5D.png)