Strona główna > Produkty > Robot współpracujący > Laboratoryjny robot HelenX > Poruszający się robot wspomagający HelenX-MR6

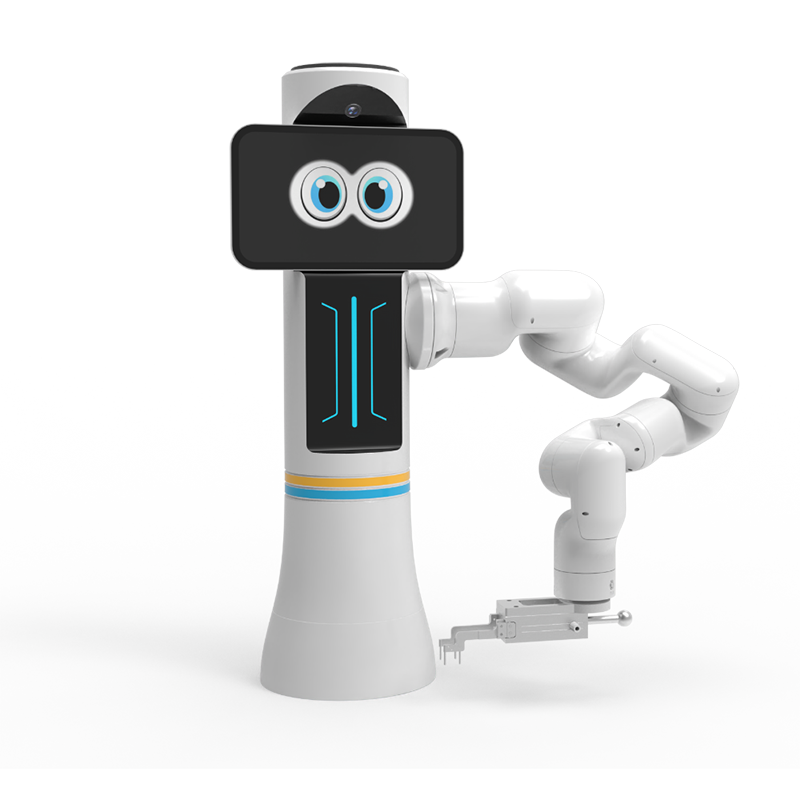
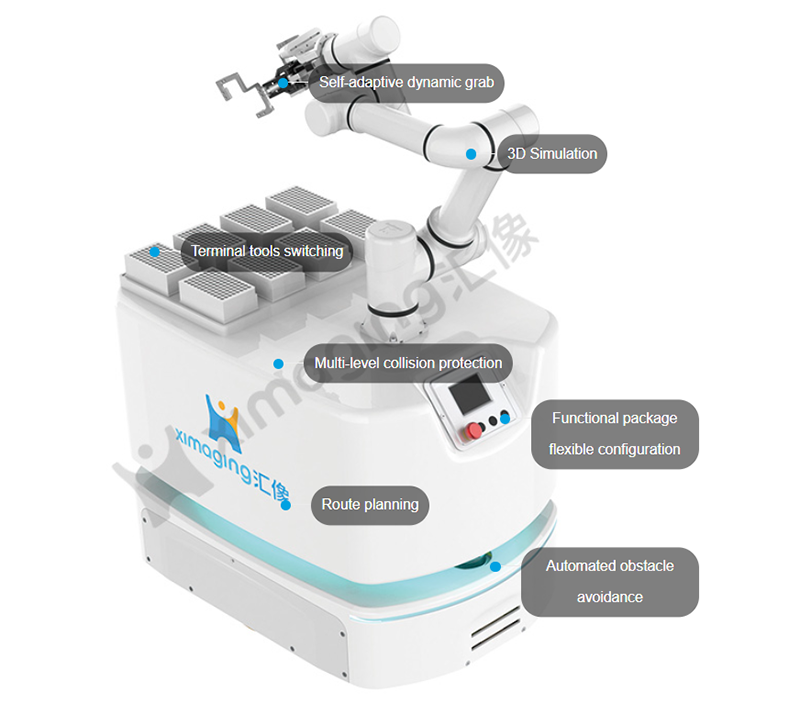
Złożony robot mobilny, opracowany przez XImaging, składa się z AMR i robota wspomagającego. Zaawansowana technologia nawigacji laserowej podwójnego trybu, wyposażona w różne czujniki i systemy wizyjne, umożliwia identyfikację otoczenia, aby unikać przeszkód na trasie, zawsze zachowując efektywne trasy do dotarcia do celu eksperymentu.
Czy występuje problem? Proszę skontaktować się z nami, abyśmy mogli Ci służyć!
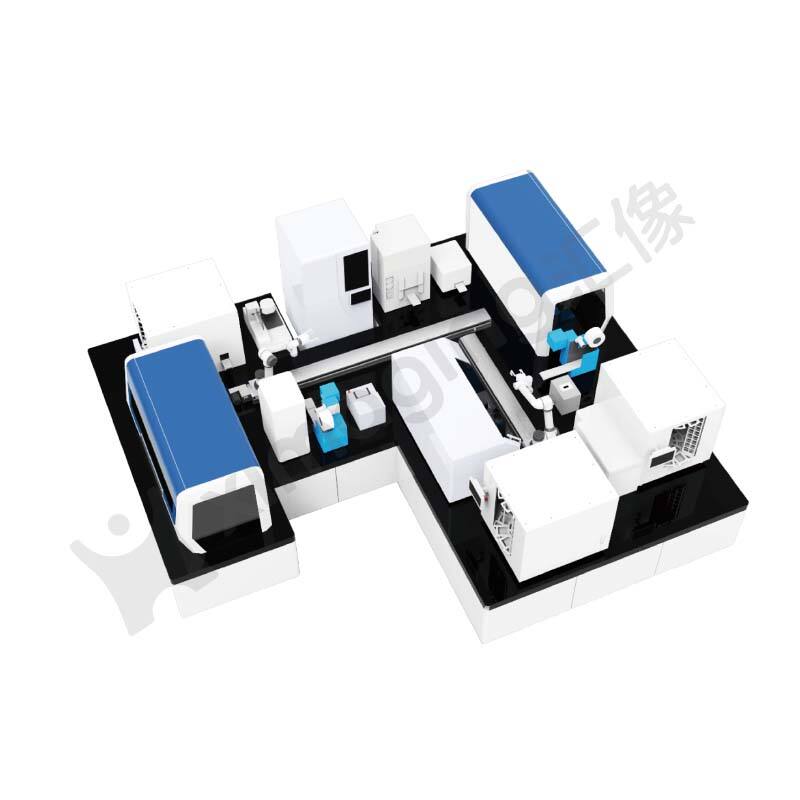
Zadowalająca wydajność pracy i spójność, robot w pełni zastępuje powtarzalne, skomplikowane i nudne operacje ręczne. Próbki ładowane są za pomocą półek o wysokiej przepustowości, co umożliwia nieobsługiwane działanie przez długi czas. Ofiarujemy dwa serie: Stały Kolejny Robot i Mobilny Kolejny Robot (Rail, AGV), dla różnych zastosowań laboratoryjnych na podstawie wymagań dotyczących przestrzeni, obciążenia i scenariuszy.
| Wymiary | 800*600*700mm |
| Waga | 120kg |
| Nawigacja | Podwójny laserowy radar SLAM |
| Metoda napędzenia | podwójna różnica kołowa |
| Obciążenie końcowe | 3kg |
| Obciążenie platformy | 150kg |
| Całkowita dokładność pozycjonowania | +/-0.5mm |
| Obciążenie platformy | 150kg |
| Maksymalna prędkość nawigacji | 1.4m/s |
| Pojemność baterii | 48v/35Ah |
| Całkowita wytrzymałość | 10h |
| Środowisko pracy | 90% wilgotności względnej (bez kondensacji); 0-50℃ |
| Metoda Ładowania | Automatycznie, zamiana baterii, ręcznie |
Ograniczona przestrzeń
Nawigacja laserowa pozwala robotom mobilnym poruszać się przez stosunkowo małe przestrzenie.
Wyposażenie w nieładku
Gdy punkty są odpowiednio rozmieszczone, roboty mobilne mogą łatwo znaleźć wymagane urządzenia.
Trudne do modyfikacji
Podstawowym wymaganiem robót mobilnych jest brak konieczności modyfikacji obecnego miejsca pracy.
Przenoszenie między piętrami
Zdolne do interakcji z windami, automatycznymi drzwiami i oknami transferowymi do przenoszenia próbek.
Nienadzorowana strefa czysta
Po zesterylizowaniu, roboty mobilne mogą działać niezależnie w strefie czystej, z możliwością zdalnego sterowania.
Środowisko groźne
Środowisko groźne dla scenariuszy zastosowań biochemicznych nie wystawia robotów mobilnych na ryzyko.
INTELIGENTNY SYSTEM OPERACYJNY DLA LABORATORIUM
Projekt interfejsu graficznego pozwala użytkownikom na łatwe tworzenie metod eksperymentalnych za pomocą przeciągania i upuszczania. Uruchamiaj je jednym kliknięciem, proste i przyjazne dla użytkownika. Potężne funkcje, umożliwiające precyzyjne sterowanie każdym pozycjonowaniem robota. Obsługuje wiele platform i urządzeń, takich jak komputery, tablety i telefony komórkowe.


![auth_code[2].png](https://shopcdnpro.grainajz.com/category/397899/2549/62d2048fdf61adc5569f440a524f1791/auth_code%5B2%5D.png)