Pagina principală > Produse > Robot colaborativ > Robot de Laborator HelenX > Robot colaborativ mobil HelenX-MR6

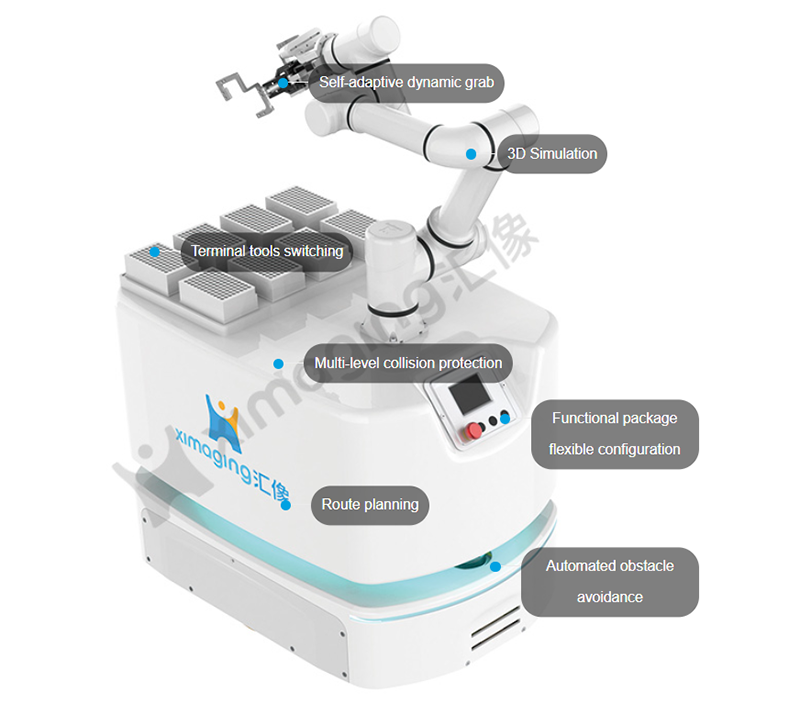
Robotul mobil compus, dezvoltat de XImaging, este format din AMR și un robot colaborativ. Tehnologia avansată de navigație cu dublu laser, instalată cu diferite senzori și sisteme de vizionare, permite identificarea mediului pentru evitarea oricărui obstacol pe traseu, menținând mereu rutine eficiente pentru a ajunge la destinație în scopul experimentelor.
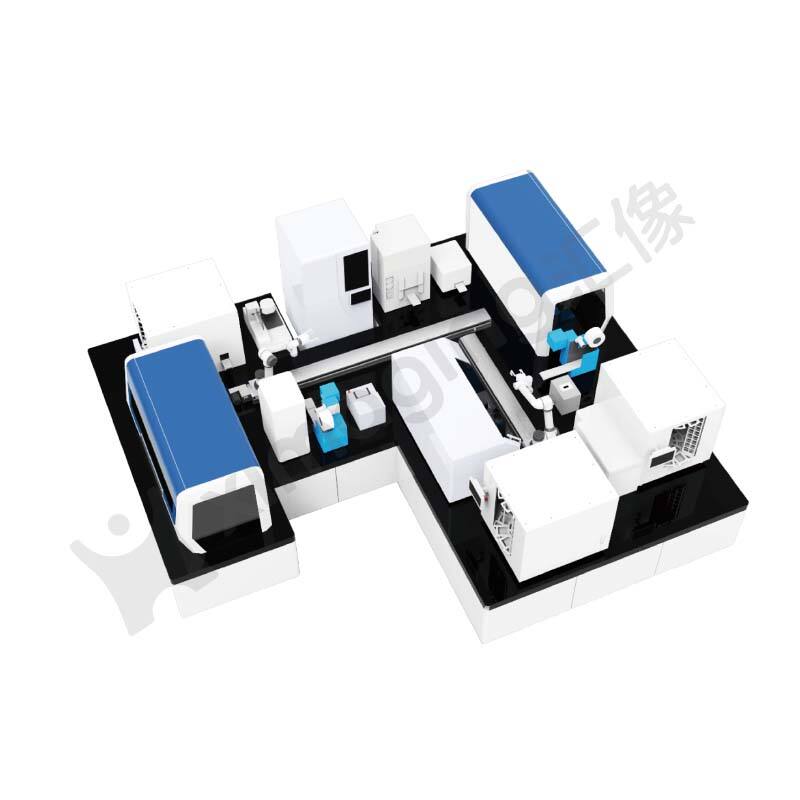
Satisfacție în ceea ce privește eficiența și coerența muncii, robotul înlocuiește complet operațiunile manuale repetitive, complexe și plictisitoare. Eșantioanele sunt încărcate prin intermediul unui suport cu flux ridicat, permițând funcționarea neasistată pe o perioadă lungă de timp. Vă oferim două serii: Robot Colaborativ Fix și Robot Colaborativ Mobil (Rail, AGV), pentru diferite aplicații experimentale, în funcție de cerințele de spațiu, sarcină și scenarii.
| Dimensiune | 800*600*700mm |
| Greutate | 120kg |
| Navigație | SLAM cu dublă rază laser |
| Metoda de Conducere | diferențial cu două roți |
| Sarcină terminală | 3kg |
| Sarcină platformă | 150kg |
| Accuratețe integrată a poziționării | +/-0.5mm |
| Sarcină platformă | 150kg |
| Viteza maximă de navigare | 1.4m/s |
| Capacitatea bateriei | 48v/35Ah |
| Rezistență comprehensivă | la ora 10 |
| Mediul de lucru | 90% umiditate relativă (necondensând); 0-50℃ |
| Metoda de taxare | Automat, schimbare baterie, manual |
Spaţiu limitat
Navigarea cu laser permite robotelor mobile să se miște prin spații relativ mici.
Echipamente în disordine
Odată ce punctele sunt dispuse corespunzător, robotele mobile pot găsi echipamentele necesare ușor.
Greu de modificat
Roboții mobilouri nu necesită, în esență, nicio modificare a locului de muncă actual.
Transfer între etaje
Capabil să interacționeze cu lifturi, uși automate și ferestre de transfer pentru transferul eșantionelor.
Zonă Curată Neasistată
După sterilizare, roboții mobilouri pot funcționa independent în zona curată, cu control la distanță.
Mediu Periculos
Mediul periculos specific scenariilor de aplicare biochimice nu va pune robuți mobili la riscul pierderii.
SISTEM DE OPERARE ȘTIINȚIFIC SMART
Proiectarea interfeței grafice permite utilizatorilor să creeze metode experimentale ușor prin trăsnete și plasare. Le puteți porni cu un singur clic, simplu și prietenos pentru utilizator. Funcții puternice, care permit control precis al fiecărei poziții ale robotului. Suportă platforme cruziate și mai multe terminale, cum ar fi PC-uri, tablete și telefoane mobile.


![auth_code[2].png](https://shopcdnpro.grainajz.com/category/397899/2549/62d2048fdf61adc5569f440a524f1791/auth_code%5B2%5D.png)