Главная страница > Продукты > Коллаборативный робот > Лабораторный робот HelenX > Мобильный коллаборативный робот HelenX-MR6

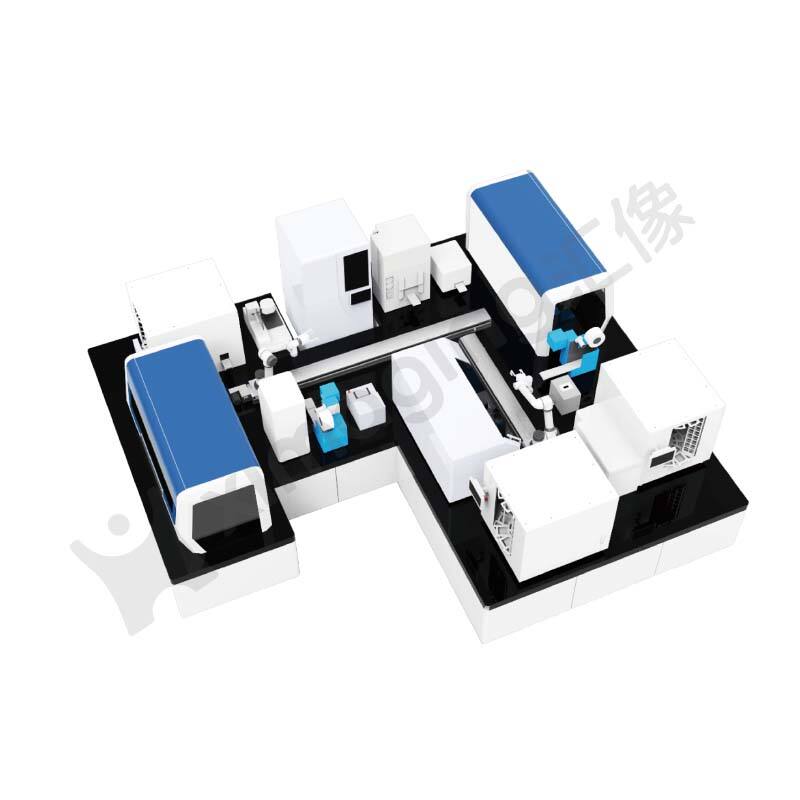
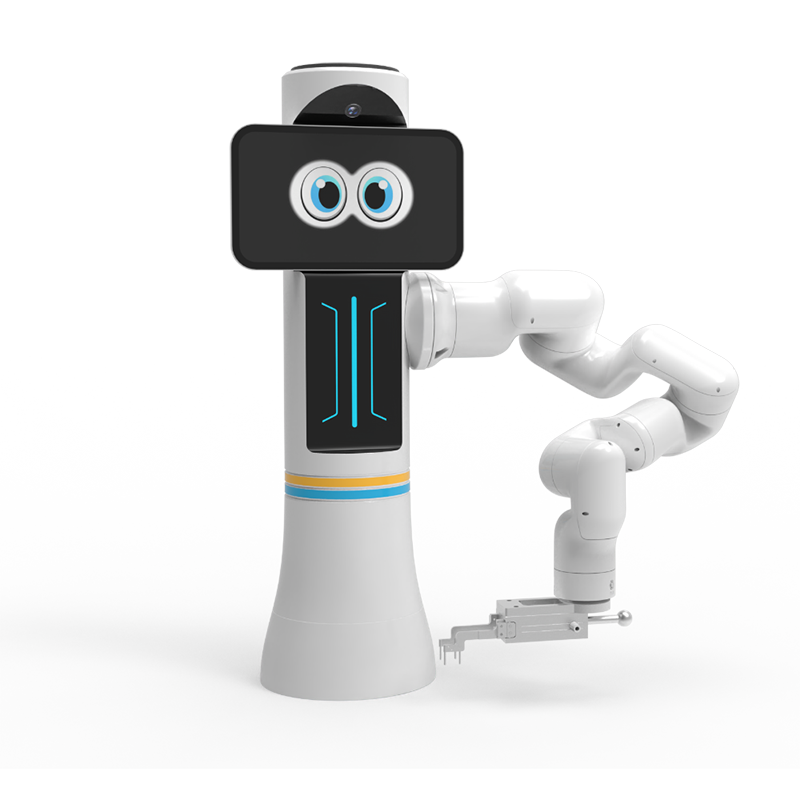
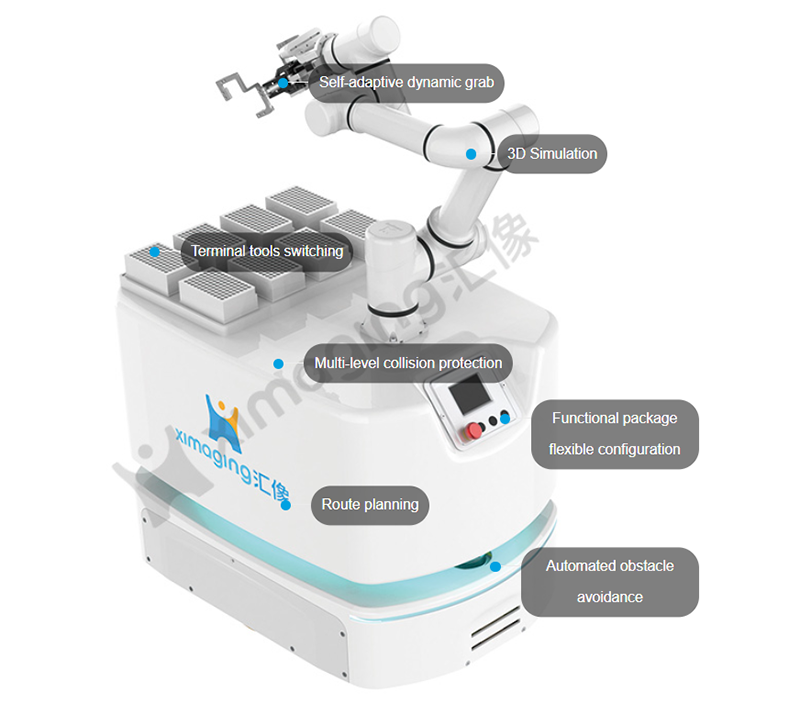
Составной мобильный робот, разработанный компанией XImaging, состоит из AMR и colaborative робота. С использованием передовой двойной лазерной навигационной технологии, оснащён различными датчиками и системами зрения, что позволяет определять окружающую среду и избегать любых препятствий на пути, всегда выбирая эффективные маршруты для достижения пункта назначения экспериментов.
Есть ли проблема? Пожалуйста, свяжитесь с нами, чтобы мы могли оказать вам помощь!
Удовлетворяющая эффективность работы и последовательность, робот полностью заменяет повторяющиеся, сложные и утомительные ручные операции. Пробы загружаются через высокоэффективную стойку, что позволяет работать без присмотра в течение длительного времени. Мы предлагаем вам две серии: Стационарный Коллаборативный Робот и Подвижный Коллаборативный Робот (Рельс, AGV), для различных экспериментальных применений на основе ваших требований к пространству, нагрузке и сценариям.
| Размер | 800*600*700mm |
| Вес | 120кг |
| Навигация | Двойной лазерный радар SLAM |
| Метод привода | дифференциал двойного колеса |
| Терминальная нагрузка | 3кг |
| Платформенная нагрузка | 150кг |
| Интегрированная точность позиционирования | +/-0.5мм |
| Платформенная нагрузка | 150кг |
| Максимальная скорость навигации | 1.4м/с |
| Ёмкость аккумулятора | 48в/35Ач |
| Комплексная выносливость | 10 часов |
| Рабочая среда | 90% относительная влажность (без конденсации); 0-50℃ |
| Метод зарядки | Автоматическая, смена батареи, ручная |
Ограниченное пространство
Лазерная навигация позволяет мобильным роботам перемещаться через относительно малое пространство.
Оборудование в беспорядке
Как только точки размещены правильно, мобильные роботы могут легко найти нужное оборудование.
Сложно для модификации
Мобильные роботы в основном не требуют модификации вашего текущего рабочего места.
Трансфер между этажами
Способен взаимодействовать с лифтами, автоматическими дверями и окнами для передачи образцов.
Необслуживаемая чистая зона
После стерилизации мобильные роботы могут работать самостоятельно в чистой зоне, с дистанционным управлением.
Опасная среда
Опасная среда для биохимических сценариев применения не представляет риска для мобильных роботов.
УМНАЯ НАУЧНАЯ ОПЕРАЦИОННАЯ СИСТЕМА
Графический интерфейс позволяет пользователям легко создавать методы экспериментов с помощью перетаскивания. Запускайте их одним щелчком мыши — просто и удобно для пользователя. Мощные функции, обеспечивающие точный контроль каждого положения робота. Поддерживает кроссплатформенность и несколько терминалов, таких как ПК, планшеты и смартфоны.


![auth_code[2].png](https://shopcdnpro.grainajz.com/category/397899/2549/62d2048fdf61adc5569f440a524f1791/auth_code%5B2%5D.png)