Pahinang Pangunahin > Mga Produkto > Collaborative robot > Robot sa Laboratorio HelenX > Mobil na kolaboratibong robot HelenX-MR6

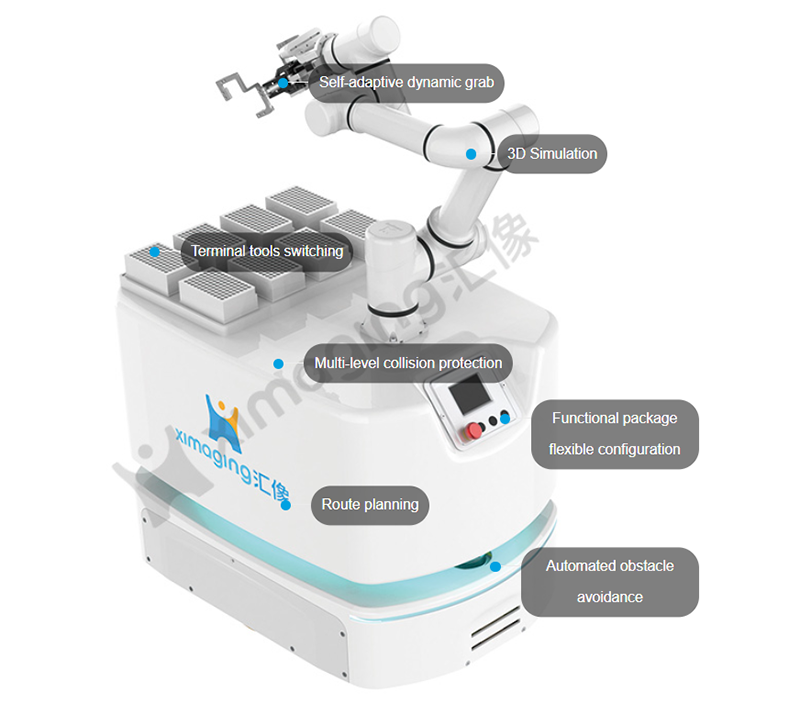
Ang compound mobile robot, na inilimbag ng XImaging, ay binubuo ng AMR at kolaboratibong robot. Nauna sa dual laser navigation technology, na may iba't ibang sensor at sistema ng pananaw, ito ay nagpapahintulot sa pagkilala ng paligid upang maiwasan ang anumang obstakulo sa regular na ruta, laging sa epektibong ruta upang maabot ang destinasyon para sa eksperimento.
May problema ba? Mangyaring makipag-ugnayan sa amin upang maglingkod sa iyo!
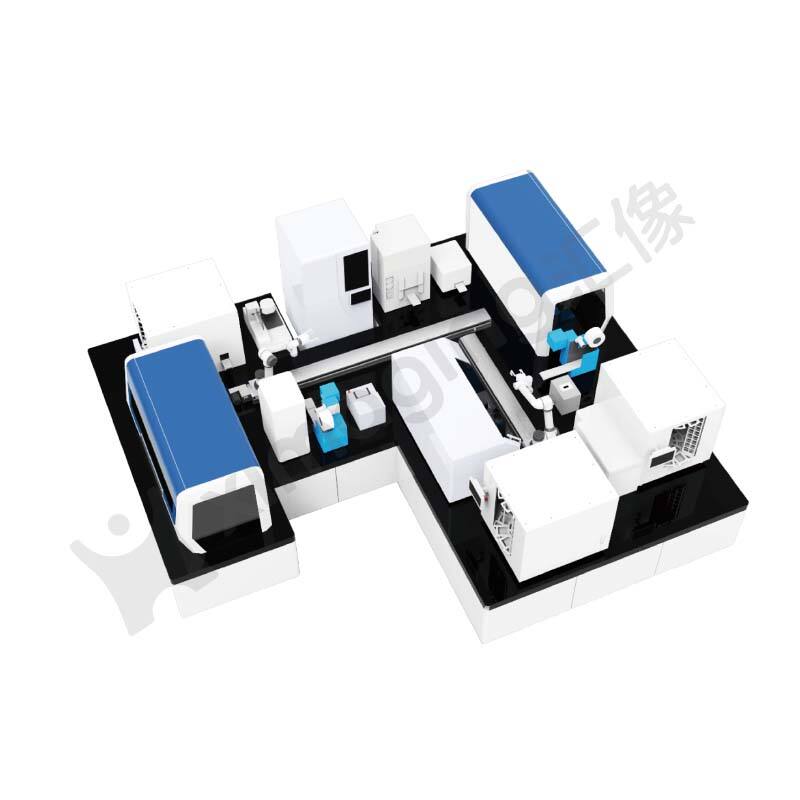
Kasinuman ng produktibidad at konsistensya, ang robot ay buo nang nakakalipat sa mga paulit-ulit, kumplikado at kumukurap na operasyon ng kamay. Ang mga sample ay iniloload sa pamamagitan ng mataas na throughput na rack, na nagpapahintulot ng opisyal na trabaho na walang panguna para sa mahabang panahon. Inaanyayahan kayong dalawang serye: Tetrap na Kolaboratibong Robot at Mobiyl na Kolaboratibong Robot (Rail, AGV), para sa iba't ibang eksperimentong aplikasyon batay sa inyong mga pangangailangan ng puwang, lohisting, at sitwasyon.
| Sukat | 800*600*700mm |
| Timbang | 120kg |
| Paglalayag | Dual laser radar SLAM |
| Paraan ng Pagdrives | double wheel differential |
| Termyunal na lohisting | 3kg |
| Platform load | 150kg |
| Kinabuhiang katumpakan ng posisyon | +/-0.5mm |
| Platform load | 150kg |
| Pinakamataas na bilis ng pag-navigate | 1.4m/s |
| Kapasidad ng Baterya | 48v/35Ah |
| Kabuuan ng panatilihin | 10h |
| Kapaligiran sa trabaho | 90% relatibong kalapitan (hindi nagkakaligo); 0-50℃ |
| Paraan ng pagbabayad | Automatiko, pagbabago ng baterya, manual |
Limitadong puwang
Ang laser navigation ay nagpapahintulot sa mobile robots upang magtakbo sa pamamagitan ng isang kumbensyonang maliit na puwang.
Baguhin ang kagamitan
Pagkatapos na maayos na inilapat ang mga punto, maaaring hanapin ng mobile robots ang kinakailangang kagamitan nang madali.
Mahirap sa Pagbabago
Ang mga mobile robot ay hindi kinakailangang baguhin ang kasalukuyang worksite mo.
Pagsisiyasat sa Makahihigit na Floor
Kayaang mag-interact sa mga elebidor, awtomatikong pinto, at transfer windows para sa pagpapasa ng sample.
Hindi Nakikitang Limpngo
Matapos sterilized, maaaring magtrabaho nang independiyente ang mga mobile robot sa limpong lugar, may remote control.
Peligroso na Kaligiran
Ang peligroso na kaligiran para sa aplikasyon ng mga scenario ng biokemikal ay hindi magpapariskuhan ang mga mobile robot.
SMART SCIENTIFIC OPERATION SYSTEM
Ang graphical interface design ay nagpapahintulot sa mga gumagamit na madali lumikha ng mga paraan ng eksperimento sa pamamagitan ng drag and drop. Simulan sila gamit ang isang klik lamang, simple at user-friendly. Makapangyarihang mga tampok, na nagbibigay-daan sa presisyong kontrol ng bawat posisyon ng robot. Suportado ito sa crossed platform at maraming terminales, tulad ng mga PC, pads, at telepono.


![auth_code[2].png](https://shopcdnpro.grainajz.com/category/397899/2549/62d2048fdf61adc5569f440a524f1791/auth_code%5B2%5D.png)