Trang chủ > Sản Phẩm > Robot hợp tác > Robot Lab HelenX > Robot cộng tác di động HelenX-MR6

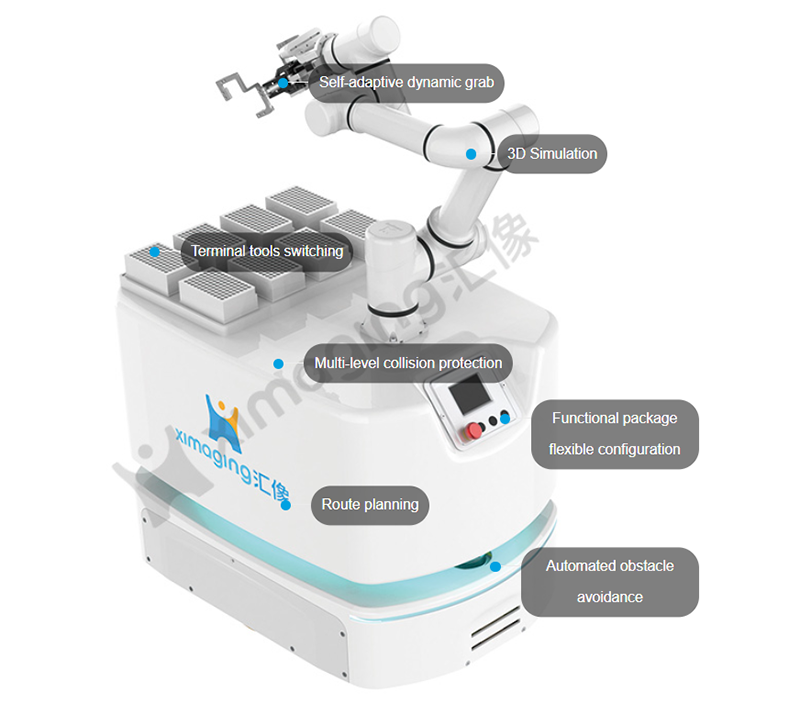
Robot di động phức hợp, do XImaging phát triển, được tạo thành từ AMR và robot cộng tác. Công nghệ định hướng laser kép tiên tiến, được trang bị nhiều loại cảm biến và hệ thống thị giác khác nhau, giúp nhận dạng môi trường xung quanh để tránh mọi chướng ngại vật trên đường đi, luôn duy trì lộ trình hiệu quả để đến đích thực hiện thí nghiệm.
Có vấn đề gì không? Vui lòng liên hệ với chúng tôi để phục vụ bạn!
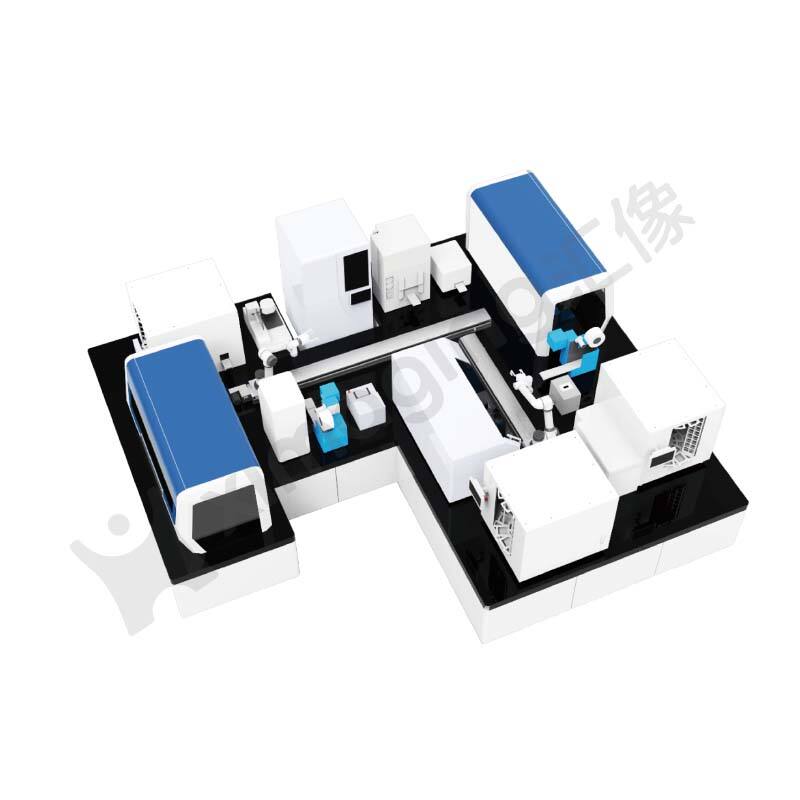
Thỏa mãn về hiệu suất công việc và tính nhất quán, robot hoàn toàn thay thế các thao tác thủ công lặp đi lặp lại, phức tạp và nhàm chán. Mẫu được tải thông qua khay thông lượng cao, cho phép vận hành không cần can thiệp trong thời gian dài. Chúng tôi cung cấp hai series: Robot Cộng tác Cố định và Robot Cộng tác Di động (Ray, AGV), phục vụ các ứng dụng thí nghiệm khác nhau dựa trên yêu cầu về không gian, tải trọng và tình huống của bạn.
| Kích thước | 800*600*700mm |
| Trọng lượng | 120kg |
| Điều hướng | SLAM bằng radar laser kép |
| Phương pháp truyền động | bánh xe kép diferential |
| Tải trọng đầu cuối | 3kg |
| Tải trọng nền tảng | 150kg |
| Độ chính xác định vị tổng hợp | +/-0.5mm |
| Tải trọng nền tảng | 150kg |
| Tốc độ điều hướng tối đa | 1.4m/s |
| Dung lượng pin | 48v/35Ah |
| Khả năng chịu đựng toàn diện | 10h |
| Môi trường làm việc | 90% độ ẩm tương đối (không ngưng tụ); 0-50℃ |
| Phương pháp sạc | Tự động, thay pin, thủ công |
Không gian hẹp
Hệ thống định vị bằng laser cho phép robot di động di chuyển qua không gian tương đối nhỏ.
Thiết bị lộn xộn
Khi các điểm được bố trí đúng cách, robot di động có thể dễ dàng tìm thấy thiết bị cần thiết.
Khó sửa đổi
Các robot di động về cơ bản không yêu cầu sửa đổi gì tại địa điểm làm việc hiện tại của bạn.
Chuyển giao giữa các tầng
Có khả năng tương tác với thang máy, cửa tự động và cửa sổ chuyển mẫu để chuyển mẫu.
Khu vực sạch không người giám sát
Sau khi được khử trùng, các robot di động có thể hoạt động độc lập trong khu vực sạch, với khả năng điều khiển từ xa.
Môi trường nguy hiểm
Môi trường nguy hiểm trong các tình huống ứng dụng sinh hóa sẽ không đặt các robot di động vào rủi ro.
HỆ THỐNG VẬN HÀNH KHOA HỌC THÔNG MINH
Thiết kế giao diện đồ họa cho phép người dùng dễ dàng tạo phương pháp thí nghiệm bằng cách kéo và thả. Bắt đầu chúng chỉ với một cú nhấp chuột, đơn giản và thân thiện với người dùng. Các chức năng mạnh mẽ, cho phép kiểm soát chính xác từng vị trí của robot. Hỗ trợ đa nền tảng và nhiều thiết bị đầu cuối như máy tính, máy tính bảng và điện thoại di động.


![auth_code[2].png](https://shopcdnpro.grainajz.com/category/397899/2549/62d2048fdf61adc5569f440a524f1791/auth_code%5B2%5D.png)