Tudalen Gyntran > Cynnyrch > Robot Gydweithredol > Robot Lab HelenX > Robot gydweithredol fesul HelenX7
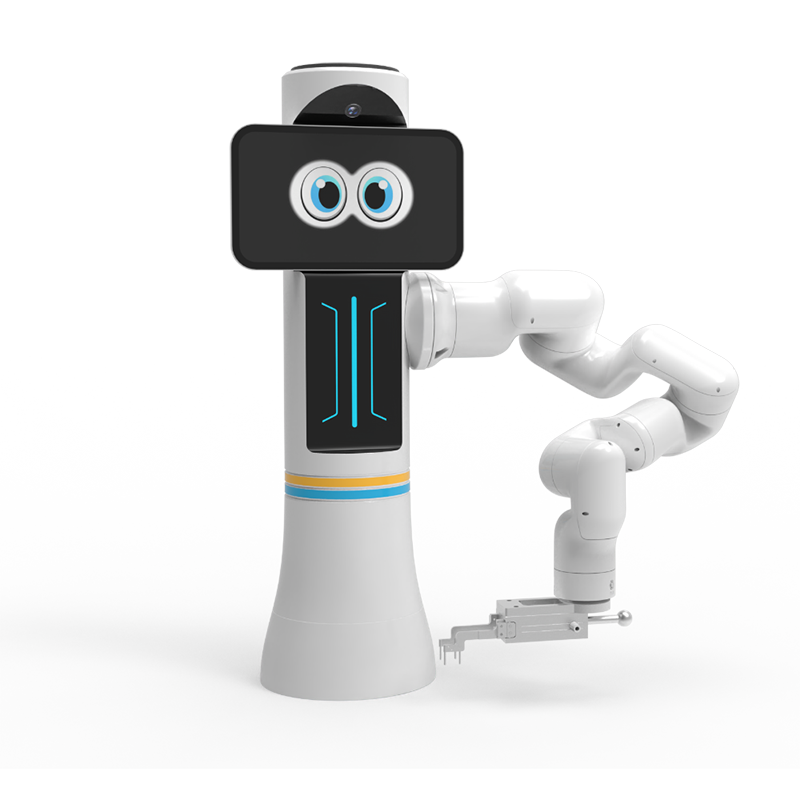
"Ysbryd Gwir" robot cydweithredol setiedig HelenX7 gwasanaethu fel ddatrysiad awtomatig ben-ben. Gall ei glymu'n gyflym â wahanol fathau o offerynnau, yn ddefnyddiol i reoli samplau at offerynnau wahanol. Gyda pherfformiad gwaith arddull a chysondeb da, gall y robot drosyni gweithrediadau llaw-dan-gofrestr yn eithafol. Gan gymysgu â ranc bwrdd uchel-trafodaeth, mae'n cyflawni gweithredu ar ôl unigol yn awtomatig am hir amser, sy'n gwneud i gyfnod L&D laboratoriwm gyrraedd yn sylweddol, yn leiaf costau a'n wella'r effaith gwaith.
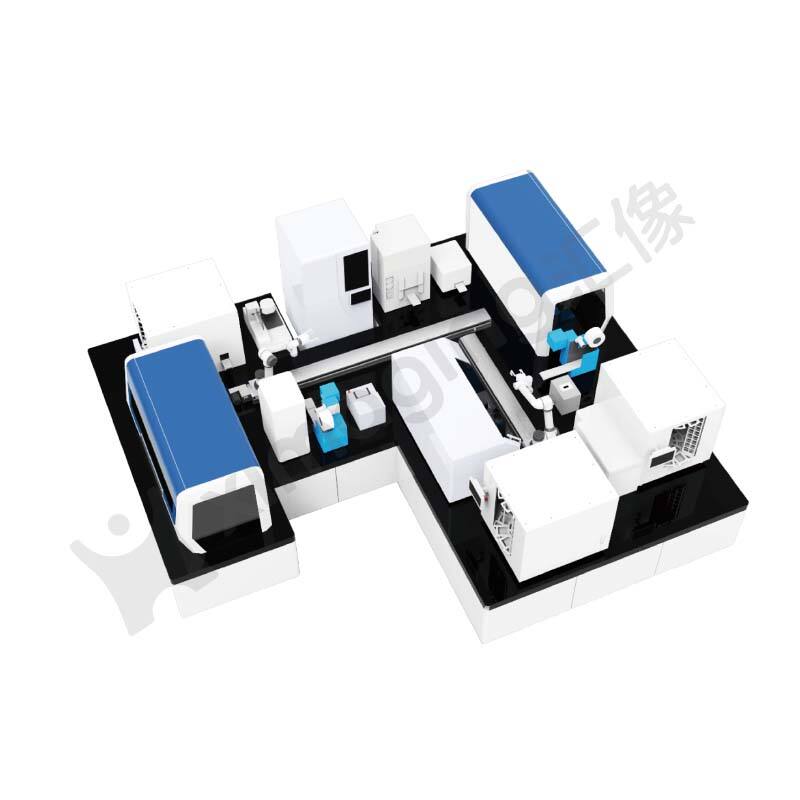
Trwy ystyried angor ardal a pherfformiad lluosog yn y labordai, mae'r robotau wedi eu cynllunio'n strategol o fewn droseddau cydweithredol fel 'cymryd, symud, lleoli a thrin sampwn', gan ddefnyddio peiriannau megis bwrdd pen, gripiannau a meddalwedd. Mae'r cynllunio hwn wedi ei ddatblygu i gymhelliadau gwyddorol. Gellir dewis rhwng dwy teulu robot: robot cydweithredol setlied a robot symudol cydweithredol, sy'n addas ar gyfer amgylchiadau gwaith wahanol, llwyddiant effeithlon a chymhelliadau defnyddiol.


| Man Geni: | Tsieina |
| Enw Brand: | Ximaging |
| Rhif Model: | HelenX7 |
| Tystysgrif: | CE,UL |
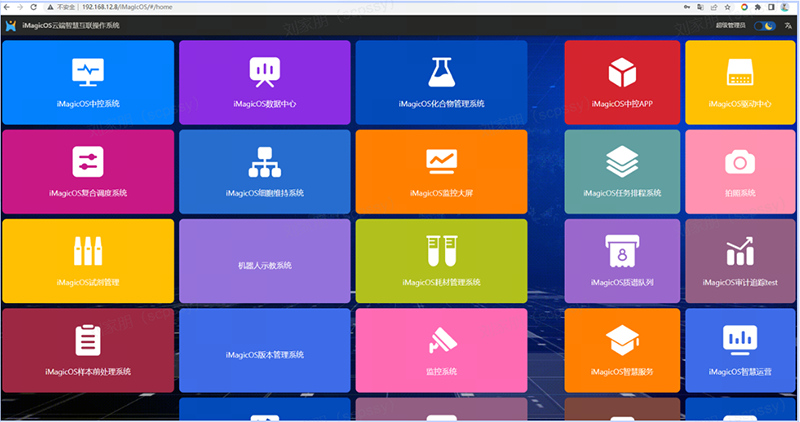
SYSTEM OPERASIADUR GWIRIONDECYDD
Dyluniad y rhestr grafigol gêm yn llawer i ddefnyddwyr creu dulliau arbrofiad drwy lwt a chasglu. Cychwyn nhw gyda chlic unig, syml a defnyddiol i'r defnyddiwr. Ffeithiau cryf, galluogi rheoli cywir ar bob le dros y robot. Mae'n cefnogi platformau croes a terfynau lluosog, megis cyfrifiaduron, pedairau, a ffônau symudol.


| Degwch amserlenni | 7 |
| Amcangyfrif Gweithred | J1:+/-180° troi, J2:+/-360° troi, J3:+/-125° troi, J4:+/-130° troi, J5:+/-360° troi, J6:+/-120° troi, J7:+/-360° troi |
| Lled mwyaf yr braichau | 580mm |
| Lwyfaint Lwyddiant Gorau | 1KG |
| Ailadroddiad | +/-0.05mm |
| Pwysau | 20KG |
| Cyflymder gwaith | 1.5m/s |
| Temperadur amgylchedd gwaith | 0-50℃ |
| Pŵer cyfartalog | 150W |
| Amserlen amgylchedd gwaith | 90% amserlen wobryniol (heb amgynnullu) |
| Cyfraddfa pŵer | 100-240VAC,50-60Hz |
Uchelgaredd uchel
Cydsyniadol ar gyfer gwahanol ffrwdfeydd, addas i lawer o scenarii arbrofiad, yn anflecsiynol.
Dyluniad arbennig ar gyfer y laboratori
Arbed le iawn o ofal, anflecsiynol heb pwyntiau marw, addas iofn i lefydd cymhlyg a chompact yn y laboratori.
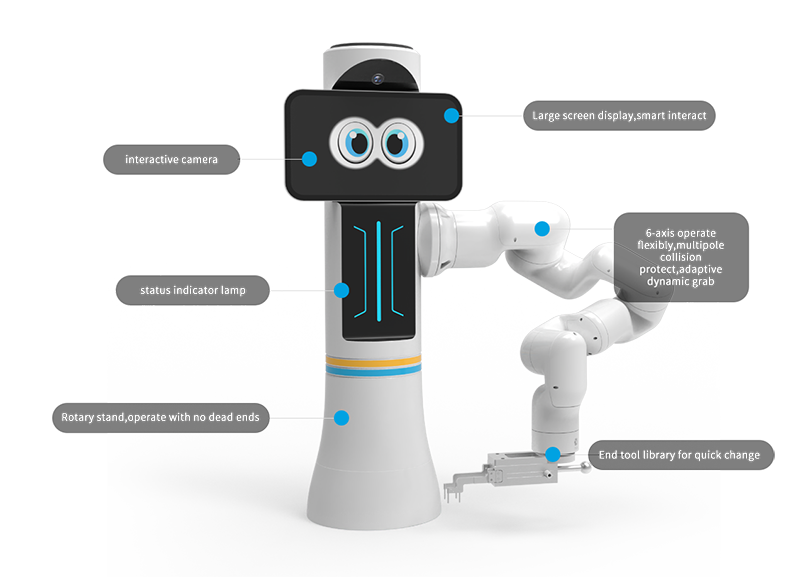
Gweithredu'n ddiogel gyda llaw
Diogelu troseddwyr a ddodlen gwrthdrawiad cyfrifol, addas i scenarii cydweithredu dynol-robotic cymhlyg.
Rhyngweithio deallus
Ffwythiannau rhyngweithiol gyda rhaglenni fawr, adnabod llef a chyfeiriad wyneb.
Modiwlau cynhwysol ar gyfer gweithredu arbrofiadau
Amrywiaeth eang o offer terfyn am gymryd samplau, codi a thiros, newid offer gyflym ac ateboldeb anflecsynol i bethau sy'n cael eu defnyddio.
Lleihau gost i gadw'r buddion yn uwch
Gweithredu'n parhaus am 24 awr, yn cynnal tasgau mwy effeithiol a chywir.
SYSTEM OPERASIADUR GWIRIONDECYDD
Dyluniad y rhestr grafigol gêm yn llawer i ddefnyddwyr creu dulliau arbrofiad drwy lwt a chasglu. Cychwyn nhw gyda chlic unig, syml a defnyddiol i'r defnyddiwr. Ffeithiau cryf, galluogi rheoli cywir ar bob le dros y robot. Mae'n cefnogi platformau croes a terfynau lluosog, megis cyfrifiaduron, pedairau, a ffônau symudol.


Defnyddir ar gyfer sefyllfaoedd ymchwil a thrafod cemegol, dadansoddiadol, a biolegol, gan gryfhau profiadau lle mae angen uchel-egwyddor ac aseddwriaeth tan.